An experimental W2W DAC and 25x16,48 MACC DSP for the first SkyWater shuttle. Designed using SpinalHDL and Klayout.
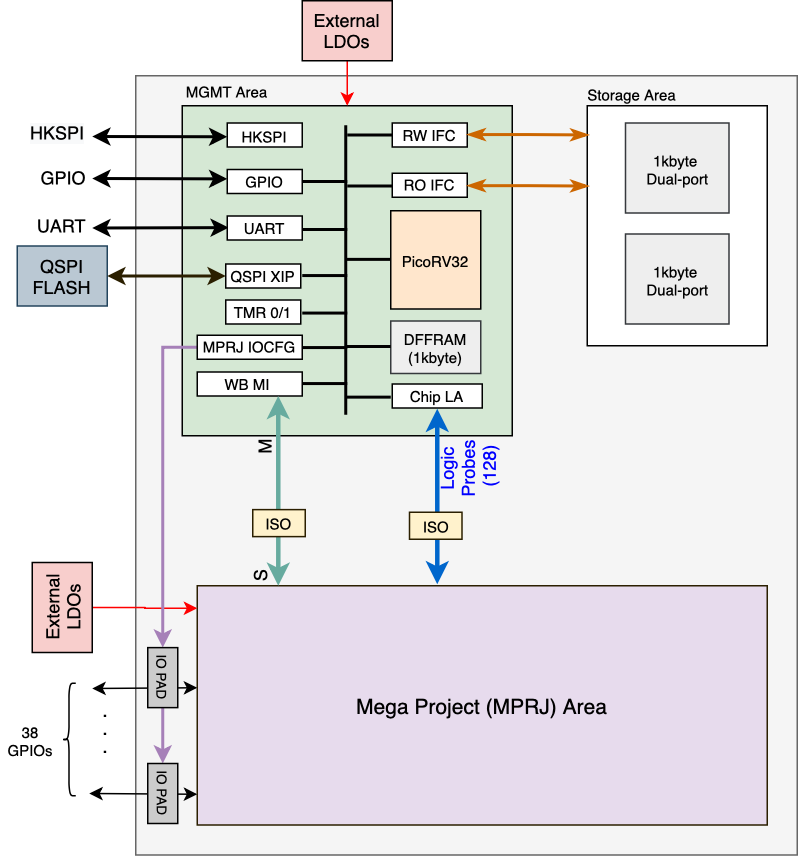
A template SoC for Google SKY130 free shuttles. It is still WIP. The current SoC architecture is given below.
Start by cloning the repo and uncompressing the files.
bash
git clone https://github.com/efabless/caravel.git
cd caravel
make uncompress
Then you need to install the open_pdks prerequisite: - Magic VLSI Layout Tool is needed to run open_pdks -- version >= 8.3.60*
\* Note: You can avoid the need for the magic prerequisite by using the openlane docker to do the installation step in open_pdks. This could be done by cloning openlane and following the instructions given there to use the Makefile.
Install the required version of the PDK by running the following commands:
bash
export PDK_ROOT=<The place where you want to install the pdk>
make pdk
Then, you can learn more about the caravel chip by watching these video: - Caravel User Project Features -- https://youtu.be/zJhnmilXGPo - Aboard Caravel -- How to put your design on Caravel? -- https://youtu.be/9QV8SDelURk - Things to Clarify About Caravel -- What versions to use with Caravel? -- https://youtu.be/-LZ522mxXMw - You could only use openlane:rc6 - Make sure you have the commit hashes provided here inside the Makefile
Your area is the full user_project_wrapper, so feel free to add your project there or create a differnt macro and harden it seperately then insert it into the user_project_wrapper. For example, if your design is analog or you're using a different tool other than OpenLANE.
If you will use OpenLANE to harden your design, go through the instructions in this README.md.
You must copy your synthesized gate-level-netlist for user_project_wrapper to verilog/gl/ and overwrite user_project_wrapper.v. Otherwise, you can point to it in info.yaml.
Note: If you're using openlane to harden your design, this should happen automatically.
Then, you will need to put your design aboard the Caravel chip. Make sure you have the following:
./gds/ in the Caravel directory.\ Note:* You can avoid the need for the magic prerequisite by using the openlane docker to run the make step. This section shows how.
Run the following command:
bash
export PDK_ROOT=<The place where the installed pdk resides. The same PDK_ROOT used in the pdk installation step>
make
This should merge the GDSes using magic and you'll end up with your version of ./gds/caravel.gds. You should expect ~90 magic DRC violations with the current "development" state of caravel.
To use the magic installed inside Openlane to complete the final GDS streaming out step, export the following:
bash
export PDK_ROOT=<The location where the pdk is installed>
export OPENLANE_ROOT=<the absolute path to the openlane directory cloned or to be cloned>
export IMAGE_NAME=<the openlane image name installed on your machine. Preferably openlane:rc6>
export CARAVEL_PATH=\$(pwd)
Then, mount the docker:
bash
docker run -it -v \$CARAVEL_PATH:\$CARAVEL_PATH -v \$OPENLANE_ROOT:/openLANE_flow -v \$PDK_ROOT:\$PDK_ROOT -e CARAVEL_PATH=\$CARAVEL_PATH -e PDK_ROOT=\$PDK_ROOT -u \$(id -u \$USER):\$(id -g \$USER) \$IMAGE_NAME
Finally, once inside the docker run the following commands:
bash
cd \$CARAVEL_PATH
make
exit
This should merge the GDSes using magic and you'll end up with your version of ./gds/caravel.gds. You should expect ~90 magic DRC violations with the current "development" state of caravel.
Please make sure to run make compress before commiting anything to your repository. Avoid having 2 versions of the gds/user_project_wrapper.gds or gds/caravel.gds one compressed and the other not compressed.
<macro>/ : includes all configuration files used to run openlane on your project.The managment SoC runs firmware that can be used to: - Configure User Project I/O pads - Observe and control User Project signals (through on-chip logic analyzer probes) - Control the User Project power supply
The memory map of the management SoC can be found here
This is the user space. It has limited silicon area (TBD, about 3.1mm x 3.8mm) as well as a fixed number of I/O pads (37) and power pads (10). See the Caravel premliminary datasheet for details. The repository contains a sample user project that contains a binary 32-bit up counter.
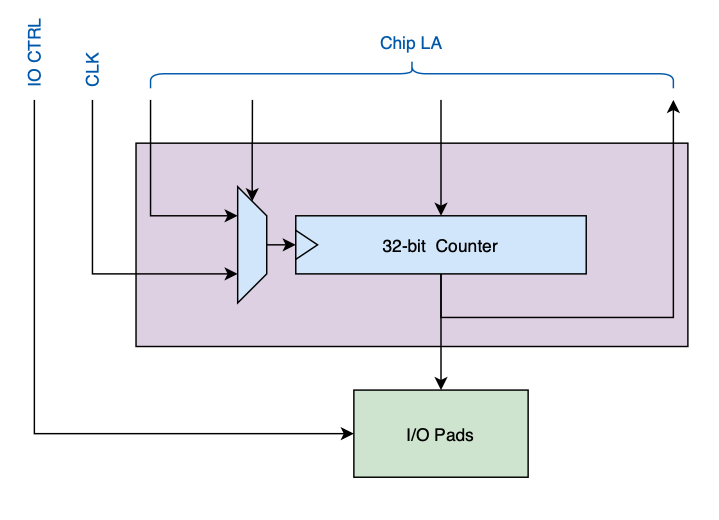
The firmware running on the Management Area SoC, configures the I/O pads used by the counter and uses the logic probes to observe/control the counter. Three firmware examples are provided: 1. Configure the User Project I/O pads as o/p. Observe the counter value in the testbench: IO_Ports Test. 2. Configure the User Project I/O pads as o/p. Use the Chip LA to load the counter and observe the o/p till it reaches 500: LA_Test1. 3. Configure the User Project I/O pads as o/p. Use the Chip LA to control the clock source and reset signals and observe the counter value for five clock cylcles: LA_Test2.

A very simple design for the first SKY130 shuttle.
1.00
Test Harness
sky130A